














 22 / 32
22 / 32

22
SUBPRO Subsea Production and Processing
In subsea oil and gas production, unexpected stops
result in the loss of valuable production time.
Additionally, the cost of intervention in the case of
a module breakdown is very high due to the need
for specialized intervention vessels and remotely
operated vehicles (ROV). It is for these reasons
that the equipment is designed and operated in
such a fashion that the chance of failure becomes
marginally small (large back-off from operational
constraints). However, this approach can lead to
very conservative operation.
Our idea is to combine health monitoring and
process control to find the optimal back-off from
the constraints. The goal is to ensure that the
RUL (Remaining useful life) of the equipment
is not exceeded before the next planned main-
tenance stop, while maximizing production. We
will develop computer models and algorithms to
solve this problem.
Control for extending component life
Project manager and PhD
supervisor, Associate
Prof. Johannes Jäschke
PhD student, Adriaen
Verheyleweghen
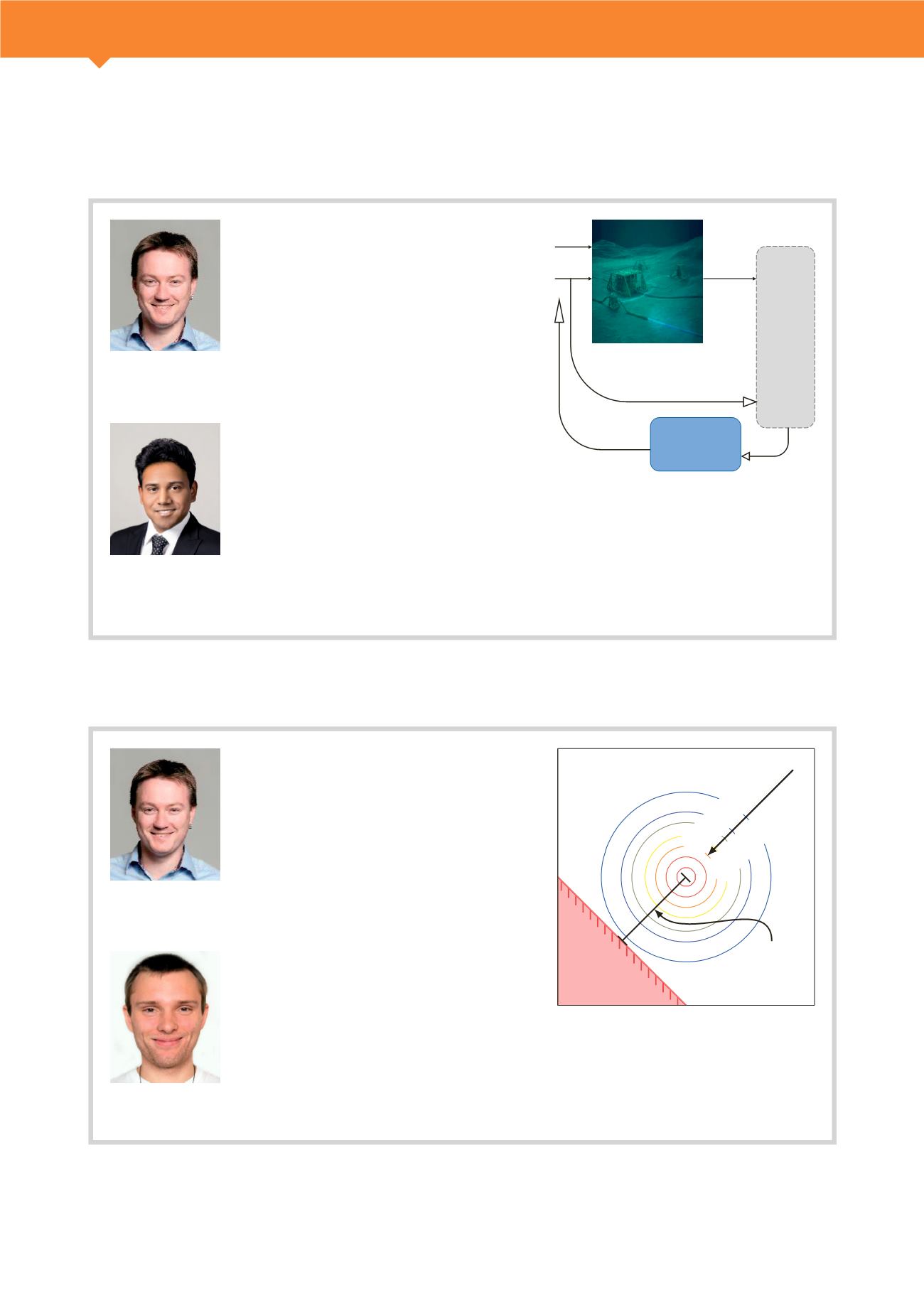
Failure
Decreasing RUL
Increasing profit
”Back-off”
x
1
x
2
Figure 18. Illustration of constraint back-off. Here
the RUL is dependent on two operational variables,
x
1
and x
2
, but there will typically be more dimen-
sions in a real situation.
In subsea oil and gas production, many important
variables are not measured due to lack of relia-
ble qualified sensors. Some of these variables are,
however, essential for process control, monitor-
ing and safety, and may further be used to plan
interventions. State and parameter estimation are
powerful tools to obtain estimates of unmeasured
variables and for improving the accuracy of meas-
urements from inaccurate sensors.
In this project, we want to develop models for sub-
sea processes, such as oil-water-gas separation.
These models would form the basis for estimation
of variables, such as oil concentration in water
outlet of the separator. For estimation, we will
use state-of-the-art estimation methods, such as
moving horizon estimation, Bayesian estimation,
extended Kalman filtering etc. Estimation algo-
rithms, if needed, would be tweaked to cater for
specific applications, such as online estimation
and control.
Estimation of un-measurable variables
Project manager and PhD
supervisor, Associate
Prof. Johannes Jäschke
PhD student, Tamal Das
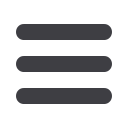
Figure 17:The measurements and the inputs to the
plant are used in the estimation block to estimate
unmeasured process variables
Subsea process
© 2015 Aker Solutions
Inputs
Measure-
ments
Estimator /
Model
(Twin plant)
Estimates
Controller / Operator
(making decisions)
Disturbances