







 56 / 130
56 / 130

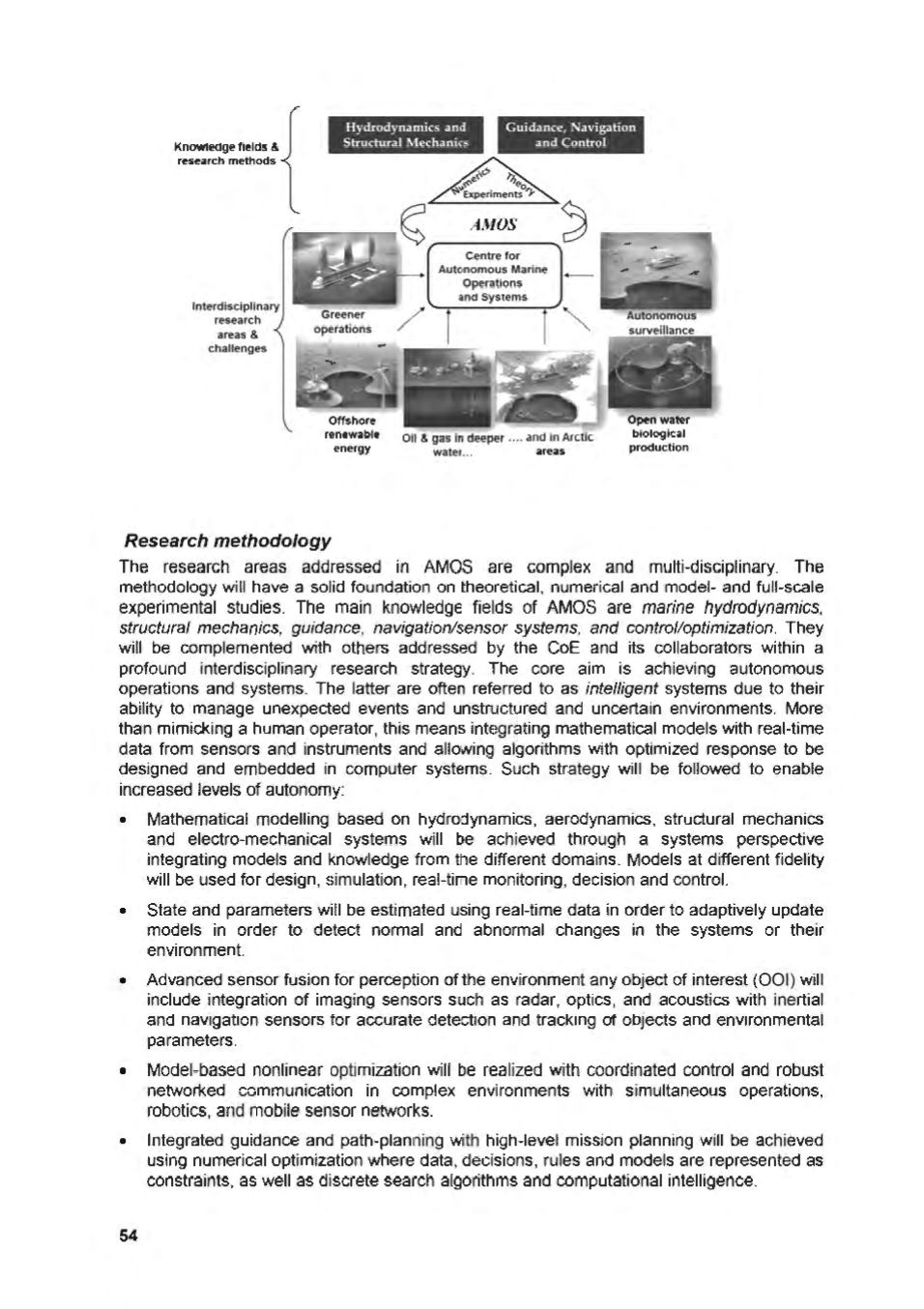
lnterdiscipllnary
research
areas
&
challenges
Research methodo/ogy
llydrodynamics and
Structural :'\1ec;hanic$
Guidance. 1\Iavigation
and Cont-rol
011 & gas In deeper ••.• and inArctic
energy
water...
are3.s
The research areas addressed in AMOS are complex and multi-disciplinary, The
methodology will have a solid foundation on
~heoretical,
numerical and model- and full-scale
experimental studies. The main knowledge fields of AMOS are
marine hydrodynamics,
structura/ mechanics, guidance, navigation/sensor systems, and control/optimization.
They
will be complemented with others addressed by the CoE and its collaborators within a
profound interdisciplinary research strategy. The core aim is achieving autonomous
operations and systems. The latter are otten referred to as
intelligent
systems due to their
ability to manage unexpected events and unstructured and uncertain environments. More
than mimicking a human operator, this means integrating mathematical models with real-time
data from sensors and instruments and allo.ving algorithms with optimized response to
be
designed and embedded in computer systems. Such strategy will be followed to enable
increased levels of autonomy:
• Mathematical modelling based on hydrodynamics, aerodynamics, structural mechanics
and electro-mechanical systems will be achieved through a systems perspective
integrating models and knowledge from the different domains. Models at different fidelity
will be used for design, simulation, real-time monitoring, decision and control.
• State and parameters will be estimated using real-time data in order to adaptively update
models in order to detect normal and abnormal changes in the systems or their
environment.
• Advanced sensor fusion for perception ofthe environment any object of interest (001) will
include integration of imaging sensors such as radar, optics, and acoustics with inertial
and navigation sensors for accurate detection and tracking of objects and environmental
parameters.
• Model-based nonlinear optimization will oe realized with coordinated control and robust
networked communication in complex environments with simultaneous operations,
robotics, and mobile sensor networks.
• lntegrated guidance and path-planning With high-level mission planning will be achieved
using numerical optimization where data, decisions, rules and models are represented as
constraints, as well as discrete search algorithms and computational intelligence.
54